However, if we transform a power function in certain ways, it can serve as a survival function. Two natural ways this can be done are shown below.
(Horizontally Reflected & Shifted Power Function — labeled ) for and , and
(Vertically Reflected & Shifted Power Function — labeled ) for and .
Note that for both of these situations. It is also understood in both cases that for . We omit reference to these values of in the rest of this article.
For ease of reference, these models will be labeled with the letters “H” and “V” as indicated above.
The Models as Transformed Power Functions
Model can be obtained from the power function as follows. First, replace with , which represents a horizontal reflection across the vertical axis. Next, replace with to get , which represents a horizontal shift the right by units. The resulting function is the same as the original for Model : .
An animation showing these two transformations when and is shown below. The animation parameter is . As increases from 0 to 1, the original power function graph gets reflected across the vertical axis. Then, as increases from 1 to 2, the reflected graph gets translated to the right.
Two-step transformation of a power function into Model when and .
A static graph of when and is shown in the figure below. Since , this particular graph is a piece of a parabola.
Model survival function for . Note that this formula can also be written as . It is more informative to keep it in the original form, however.
Model is obtained from the power function as follows. First, put a negative sign in front of this expression to get , which represents a vertical reflection across the horizontal axis. Then add one to this expression, which represents a vertical shift upward by one unit, to get Model : .
An animation showing these two transformations when and is shown below. The animation parameter is . As increases from 0 to 1, the original power function graph gets reflected across the vertical axis. Then, as increases from 1 to 2, the reflected graph gets translated to the right.
Two-step transformation of a power function into Model when and .
A static graph of when and is shown in the figure below. Since , this particular graph is also a piece of a parabola.
Model survival function for .
Animating the Model Graphs
It is also informative to make animations of the final model graphs, especially as varies.
An animation of model with as varies from 0.2 to 5 is shown below. This model is more realistic for human lifetimes when . Why?
Model with as varies from 0.2 to 5.
An animation of model with as varies from 0.2 to 5 is shown below. This time, the model is more realistic for human lifetimes when . Why?
Model with as varies from 0.2 to 5.
Let us consider the more realistic models of human lifetimes. Are there subtle distinctions between the graph for model when and the graph for model when ?
Yes. The main distinction I see is that the graph for model when is more “extreme” than for model when . When , the slope of the graph for model suddenly goes down to zero as approaches . The graph for model has a more gradual change in its slope. Perhaps this is an artifact of the ranges of values chosen for in the animation, perhaps not.
In my mind, this seems to imply that model might be the more realistic of the two models. We will now explore some other functions related to these models and see how they compare.
Forces of Mortality and Probability Density Functions
In this section we will compute and graph the force of mortality (FM) and probability density function (PDF) for each of the models.
Forces of Mortality
For Model , the force of mortality is for .
And for Model , the force of mortality is for .
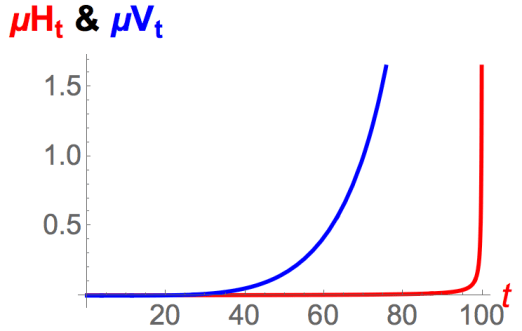
In both cases, there will be a vertical asymptote at . But how do the graphs compare? I made static graphs and put them in the same picture below. For Model , I chose . And for Model , I chose . Once again, at least for the values of chosen, model (blue) seems more realistic. It is less “extreme” in its behavior.
Forces of mortality. The red graph is Model , when and . The blue graph is Model , when and . Once again, at least for the values of chosen, model (blue) seems more realistic. It is less ‘extreme’ in its behavior.
Probability Density Functions
The PDF for Model is the opposite of the derivative of its survival function: .
Likewise, the PDF for Model is .
Static graphs of these in the same situations as above are shown below. Once again, Model (blue) seems to be more realistic (the red graph actually has a vertical asymptote at since in that case).
Probability Density Functions. The red graph is Model when and . The blue graph is Model when and . Once again, at least for the values of chosen, model (blue) seems more realistic. It is less ‘extreme’ in its behavior.
General Survival Functions and Complete Expectations of Life
General Survival Functions
Assuming survival to age , the continuous remaining lifetime random variable is . The conditional survival function (SF) is , the conditional force of mortality (FM) is , and the conditional probability density function (PDF) is .
I will leave it as an exercise for you to check the following formulas:
(Model H) The SF is , the FM is and the PDF is .
(Model V) The SF is , the FM is and the PDF is .
Complete Expectation of Life
The complete expectation of life is the mean (expected value) of . It is denoted by and is defined by .
For Model , the relevant integral to do is . This can be done with a substitution: so that and . After changing limits of integration and swapping them around to get rid of the minus sign, this gives .
For Model , the relevant integral to do is . This can be rewritten as . The last integral is .
Therefore, for Model , we have .
So, while Model seemed to be more realistic than Model , we see that the formula for its conditional mean is much more complicated. Is this trade-off worth it? It probably is as long as you have the necessary computing technology.
Graphs of Complete Expectations of Life
How do the graphs of in these two situations compare? They are shown below. For Model , we use . And for Model , we use . I would say it’s difficult to say which complete expectation of life is more realistic here, though the blue one has more “complexity” to it since it is nonlinear.
The complete expectation of life functions. Model (with and ) is in red and is linear. Model (with and ) is in blue and is nonlinear. We have consistently been saying that Model seems more realistic for these choices of the parameters. This claim is not necessarily true just from looking at these graphs, though a linear might seem unrealistic just by the very fact that it is too simple.
Neither of these sums is easy to simplify. We will therefore just be content to graph these functions of and compare them as we did for the complete expectations of life.
In fact, the end result is almost indistinguishable from the graph above.
The curtate expectation of life functions. Model (with and ) is in red. Model (with and ) is in blue. These graphs look almost indistinguishable from the ones above.
They are different functions, however. In fact, for Model , we can compute and . And for Model , we can compute and .


=1-\frac{t^{p}}{\omega^{p}}") .
.=at^{p}") for some constants
for some constants  and
and  .
.
")
=1")
=0")
)
for
and
, and
)
for
=0")
=0")





=\omega-t")

=\,_{t}p_{0}=\frac{(\omega-t)^{p}}{\omega^{p}}=\left(\frac{\omega-t}{\omega}\right)^{p}")




=\,_{t}p_{0}=\left(1-\frac{t}{100}\right)^{2}") for
for  . Note that this formula can also be written as
. Note that this formula can also be written as =\,_{t}p_{0}=1-\frac{t}{50}+\frac{t^{2}}{10000}") . It is more informative to keep it in the original form, however.
. It is more informative to keep it in the original form, however.

=\,_{t}p_{0}=1-\frac{t^{2}}{10000}") for
for 


=\,_{t}p_{0}=\left(1-\frac{t}{\omega}\right)^{p}")

=\,_{t}p_{0}=1-\left(\frac{t}{\omega}\right)^{p}")
^{p}\right)}{\left(1-\frac{t}{\omega}\right)^{p}}=\frac{-p\left(1-\frac{t}{\omega}\right)^{p-1}\cdot \left(-\frac{1}{\omega}\right)}{\left(1-\frac{t}{\omega}\right)^{p}}=\frac{p}{\omega-t}")

}{1-\frac{t^{p}}{\omega^{p}}}=\frac{\frac{pt^{p-1}}{\omega^{p}}}{1-\frac{t^{p}}{\omega^{p}}}=\frac{pt^{p-1}}{\omega^{p}-t^{p}}")



 when
when  when
when ^{p}\right)=-p\left(1-\frac{t}{\omega}\right)^{p-1}\cdot \left(-\frac{1}{\omega}\right)=\frac{p}{\omega}\left(1-\frac{t}{\omega}\right)^{p-1}")
=\frac{p}{\omega^{p}}t^{p-1}")


=\frac{p}{\omega}\left(1-\frac{t}{\omega}\right)^{p-1}") when
when =\frac{p}{\omega^{p}}t^{p-1}") when
when 

}{S_{0}(x)}")

=-\frac{d}{dt}\left(\,_{t}p_{x}\right)=\,_{t}p_{x}\mu_{x+t}")
, the FM is
and the PDF is
.
, the FM is
and the PDF is
.


![\stackrel{\circ}e_{x}=E[T_{x}]=\displaystyle\int_{0}^{\infty}tf_{x}(t)dt=\displaystyle\int_{0}^{\infty}\,_{t}p_{x}dt](https://s0.wp.com/latex.php?latex=%5Cstackrel%7B%5Ccirc%7De_%7Bx%7D%3DE%5BT_%7Bx%7D%5D%3D%5Cdisplaystyle%5Cint_%7B0%7D%5E%7B%5Cinfty%7Dtf_%7Bx%7D%28t%29dt%3D%5Cdisplaystyle%5Cint_%7B0%7D%5E%7B%5Cinfty%7D%5C%2C_%7Bt%7Dp_%7Bx%7Ddt&bg=ffffff&fg=000000&s=0 "\stackrel{\circ}e_{x}=E[T_{x}]=\displaystyle\int_{0}^{\infty}tf_{x}(t)dt=\displaystyle\int_{0}^{\infty}\,_{t}p_{x}dt")
^{p}\, dt")


\, du")
\displaystyle\int_{0}^{1}u^{p}\, du=\frac{\omega-x}{p+1}")
^{p}}{\omega^{p}-x^{p}}\, dt")
}{\omega^{p}-x^{p}}-\frac{1}{\omega^{p}-x^{p}}\displaystyle\int_{0}^{\omega-x}(x+t)^{p}\, dt")
^{p}\, dt=\frac{(x+t)^{p+1}}{p+1}\biggr\rvert_{t=0}^{t=\omega-x}=\frac{\omega^{p+1}-x^{p+1}}{p+1}")
\omega^{p}(\omega-x)+x^{p+1}-\omega^{p+1}}{(p+1)(\omega^{p}-x^{p})}")


![P[K_{x}=k]=\,_{k}|q_{x}=\,_{k}p_{x}-\,_{k+1}p_{x}=\,_{k}p_{x}\cdot q_{x+k}](https://s0.wp.com/latex.php?latex=P%5BK_%7Bx%7D%3Dk%5D%3D%5C%2C_%7Bk%7D%7Cq_%7Bx%7D%3D%5C%2C_%7Bk%7Dp_%7Bx%7D-%5C%2C_%7Bk%2B1%7Dp_%7Bx%7D%3D%5C%2C_%7Bk%7Dp_%7Bx%7D%5Ccdot+q_%7Bx%2Bk%7D&bg=ffffff&fg=000000&s=0 "P[K_{x}=k]=\,_{k}|q_{x}=\,_{k}p_{x}-\,_{k+1}p_{x}=\,_{k}p_{x}\cdot q_{x+k}")


^{p}")
^{p}")
^{p}}{\omega^{p}-x^{p}}")
^{p}}{\omega^{p}-x^{p}}")





