
Visual Linear Algebra Online, Section 1.3

Jack and Jill earn a combined $79.50 when Jack works 2 hours and Jill works 3 hours. On the other hand, if Jack works 3 hours and Jill works 2 hours, they make $78.75 total. What are their individual hourly pay rates?
This is a typical kind of problem you might encounter in a situation where there are two unknowns. In this case, the unknowns are Jack’s and Jill’s individual pay rates. One approach to solving this problem is to just make guesses.
In both situations, the total number of hours worked is five. In addition, the total amount of money earned in both situations is close to $79. Since 
Since the total amount earned is a bit more when Jill works more hours than Jack, we can say that Jill’s pay rate should be slightly higher than Jack’s pay rate. So, we might guess that Jack earns 15.50 $/hr and Jill earns 16.10 $/hr. This is probably not exactly right, but we can check how close it is as follows.


These are very close to the actual amounts $79.50 and $78.75 from above, so the correct answers for the pay rates would just take a bit more tweaking to find. However, we could easily end up guessing another five or six times before we come upon the exact right answers.
Use Algebra!
A better approach is to use algebra!
Represent their pay rates by letters which are “unknowns”. Suppose 






We use the curly bracket symbol { to emphasize that these two equations are a “system”. They “go together”.
A system of equations like this is called an open sentence. This means it is neither true nor false. The open sentence only becomes true or false upon substitution of particular pair of numbers.
A solution of this system is a pair of numbers ")
In the present example, the unique solution is the pair =(15.45,16.20)")


Of course, this begs a question. How did we find the unique solution?
There are two main methods: substitution and elimination.
Substitution
In the method of substitution, we use algebra techniques in the following order.
- Solve one of the equations for one of the variables (it doesn’t matter which equation or which variable).
- Substitute the answer from step 1 into the other equation in place of the variable that was solved for. That other equation will now only involve one variable, so solve for it.
- Plug the answer from step 2 into any of the equations involving the two unknowns to solve for the other variable.
Substitution Details for Jack and Jill’s Pay Rates
Let us see how this works for the current system.
In step 1, we will solve the first equation for

Now for step 2. In the second equation 

=78.75")




This is the correct value for
In step 3, we plug 


The unique final answer is the ordered pair
Technically-speaking, checking that this solves the original system does more than just confirm that we are right. It actually proves we are right. All the algebra that we have done just confirms that this ordered pair is the only possible solution. It does not prove it is an actual solution.
We will discuss this more when we look at extraneous solutions (to nonlinear equations) further below.
Elimination
The second method is called the method of elimination. For this method, we attempt to rewrite the original system in equivalent forms so that one of the variables is “eliminated” (deleted) from each equation.
Once again, logically-speaking, this will only serve to derive possible solutions. The proof that we have derived true solutions is in the checking.
Start by observing the nature of the original system.
If we multiply the top equation by 3 and the bottom equation by 2, there will be a 
=3\cdot 79.50 \\ 2\cdot(3x+2y)=2\cdot 78.75,\end{cases}\mbox{ or}")

Subtracting the second equation from the first results in +(9y-4y)=238.50-157.50")

Of course, this last equation now can be quickly solved for
The New System
So instead, we say we now have a “new system” where the

Now we notice that if we multiply the first equation by 5 and the second equation by 3, then we can subtract the second equation from the first to get a “new” first equation where we have “eliminated”
Below you will find the details. In the final step we divide the first equation by 10 and the second equation by 5.

so

and

We are purposely formatting the resulting systems in an odd way (with the
Visualizing Systems and Their Solutions in Rectangular Coordinates
The facts that 1) linear equations have graphs which are straight lines in rectangular coordinates and 2) solutions of linear equations are ordered pairs
We consider a new example.

Instead of fully solving this system right away using either substitution or elimination, let us graph both linear equations in the plane first, using rectangular coordinates.
Recall that the graph, in rectangular coordinates, of an equation in two unknowns
To make these graphs, solve each equation for
For the first equation 

Now you can either plot points or use the slopes and intercepts of these lines to make the following graphs.
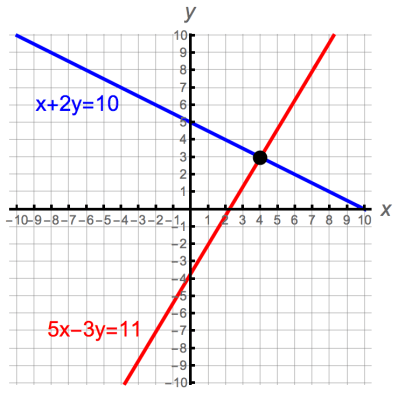
=(4,3)") is the unique solution of the system.
is the unique solution of the system.Since any solution
We can easily check (prove!) that this is a solution to the system: 

But is it the only solution? And how could we have found it algebraically? Use our methods from above.
Substitution
We have already solved both equations for
In this case, since the first equation of the system became 


Here are the steps.

From this we then get 

This work proves that
Elimination
For the elimination method, we start by swapping the order of the equations. This is not absolutely necessary, but it is a standard “row operation” and make our next operations a little bit easier.

Now multiply the first equation by 5, leave the second equation unchanged (multiply it by 1), and then subtract the first equation from the second to obtain a “new” second equation. Also, even though we multiplied the first equation by 5 before the subtraction, keep the first equation unchanged in the system.

We note that this operation also could have been conceptualized as multiplying the first equation by 
Now divide the new second equation by 



It is good to see that we got the same answer as before. When you are first learning these techniques, you might want to try both methods on at least a few problems as a way to double-check your answers.
Visualizing Elimination as a Transformation
There is an interesting way that the process of elimination can be visualized. In particular, we will visualize each “elimination step” as a “transformation”. Let us start with the step where
We can think of this step as a combination of smaller steps. Multiply the first equation by
Now, instead of multiplying the first equation by 

x+(-3+2t)y & = & 11+10t\end{array}\end{cases}")
Note that in the second equation 


When 

Animation 1
We can visualize how the graph of x+(-3+2t)y = 11+10t")



 and
and x+(-3+2t)y=11+10t") as decreases from 0 down to . When , the equation is , or , whose graph is horizontal. As changes, the original line transforms to a new horizontal line via a rotation about the solution at .. This is equivalent to eliminating . The intersection point stays the same because these systems are all equivalent for all .
as decreases from 0 down to . When , the equation is , or , whose graph is horizontal. As changes, the original line transforms to a new horizontal line via a rotation about the solution at .. This is equivalent to eliminating . The intersection point stays the same because these systems are all equivalent for all .Animation 2
The step to eliminate

Now multiply the second equation by an unspecified parameter 
y & = & 10+3t \\ y & = & 3\end{array}\end{cases}")
We can see from this that 
 and
and y=10+3t") as decreases from 0 down to . When , the transformed equation is
as decreases from 0 down to . When , the transformed equation is  , whose graph is vertical. As changes, the original line transforms to a new vertical line via a rotation about the solution at .. This is equivalent to eliminating . The intersection point stays the same because these systems are all equivalent for all .
, whose graph is vertical. As changes, the original line transforms to a new vertical line via a rotation about the solution at .. This is equivalent to eliminating . The intersection point stays the same because these systems are all equivalent for all .As we saw above, the final answer is

Are These Rotations Occurring at a Constant Rate?
One nice thing about visuals like this is that they can spur us to ask and try to answer interesting questions.
For example, do the angles of rotation change at constant rates in these animations? It is a bit tough to tell in the second animation. In the first one, it seems that perhaps the angle is changing faster when the line is steep than when it is flat.
But, appearances can be deceiving. It would be best to do some calculations to confirm what is going on.
Dot Product and Angles
Recall from from Section 1.2, “Vectors in Two Dimensions” that the angle between two nonzero vectors 

=\cos^{-1}\left(\frac{{\bf v}\cdot {\bf w}}{||{\bf v}|| ||{\bf w}||}\right)")



Choosing Vectors Parallel to the Lines
Consider the second animation above. One vector that is parallel to the horizontal red line is ")
For any fixed 

We would like to find a vector that stays parallel to the blue line as 
=\frac{4}{2+t}")
In other words, ")
If we place the vectors 
 and are parallel to the blue and red lines, respectively. We are interested in whether the angle
and are parallel to the blue and red lines, respectively. We are interested in whether the angle  changes at a constant rate as decreases or not.
changes at a constant rate as decreases or not.Angle Calculation
The length of 
^{2}+\left(\frac{4}{2+t}\right)^{2}}=\sqrt{\frac{16(2+t)^{2}+16}{(2+t)^{2}}}=\frac{\sqrt{80+64t+16t^{2}}}{2+t}")
In this last calculation, note that ^{2}}=|2+t|=2+t")

Finally, the dot product of 
Therefore, as a function of =\arccos\left(\frac{8+4t}{\sqrt{80+64t+16t^{2}}}\right)")
This is certainly not a linear function of
The graph of this function is shown below. Note that the derivative 
 as a function of the parameter . This graph is not a straight line. The rotation is not at a constant rate.
as a function of the parameter . This graph is not a straight line. The rotation is not at a constant rate.Classification of Two-Dimensional Linear Systems
What can we say about the general two-dimensional linear system?

Geometric Approach
Start by thinking geometrically (in rectangular coordinates). Assuming either 





Typically (“generically”), these two lines will have two different slopes. In that case, they will intersect at just one point, which will evidently be the unique solution of the linear system.
If the lines happen to have the same slope, then they will be parallel. If these two parallel lines are distinct, the lines will not intersect and the linear system will have no solution.
On the other hand, if these two parallel lines are actually the same parallel line, there will evidently be infinitely many solutions to the linear system (all the points on this common line).
Systems which have a solution are called consistent. Systems which do not have a solution are called inconsistent.
Algebraic Approach
How would this play out if we attempted to do row operations in the general case?
Unique Solutions
To keep things simple, assume that 



It is of utmost importance to note that the second operation above can only be performed if we also assume that 
The quantity 
Back-substitution of 

Therefore, when ")
It is an exercise to show that the same answer can be obtained when 
Infinitely Many Solutions or No Solutions
On the other hand, if the determinant 
It is an exercise to show that there are infinitely many solutions if the equations 





It is also an exercise to show that there are no solutions when 
Parametric Vector Form of Solutions in the Infinite Case
Consider the case where 
Doing row operations in this situation will result in a second equation that is converted to 
In the case where 

In this setting, it is customary to call
=\left(\begin{array}{c} x \\ -\frac{a}{b}x+\frac{u}{b} \end{array}\right)=\left(\begin{array}{c} 0 \\ \frac{u}{b} \end{array}\right)+x\left(\begin{array}{c} 1 \\ -\frac{a}{b}\end{array}\right)={\bf v}+x{\bf w}")
In doing this, we are: 1) viewing the solutions as vectors rather than as points (using the natural association between points and vectors discussed in Section 1.2, “Vectors in Two Dimensions”) and 2) treating the vectors
Because there is one (linear) parameter, the solution set can be at most one-dimensional. In fact, it is exactly one-dimensional and is, of course, a straight line.
Viewing Solutions in Terms of the Geometry of Vector Operations
If we place the initial point of ")
")
For example, suppose the system is the following.

These equations are constant multiples of each other and row operations will produce a second equation that can be discarded. The solution set is the line represented by 

+x\left(\begin{array}{c} 1 \\ 2 \end{array}\right)")
And here is a way to visualize the solution set that takes advantage of our understanding of the geometry of vector addition and scalar multiplication. As a set of points, the solution set is the green line. As a set of vectors, the solution set consists of all the magenta-colored (pink) vectors.
Important Observations
Note that ")
On the other hand, the vector ")

This is an observation that will generalize to higher dimensions. Make sure you remember it for the future.
Relationship to Coordinate Changes
Consider once again the general linear system, written in a slightly different way.

As discussed in Section 1.1, “Points, Coordinates, and Graphs in Two Dimensions”, it will be helpful in future sections to think of these equations as defining a “linear transformation”. This linear transformation will essentially take a system of rectangular coordinates ")
Assuming that the determinant
As a system of equations, the inverse transformation can be written as follows.

Extraneous Solutions of Nonlinear Equations
Finally, we re-emphasize the logical importance of checking solutions. Logically-speaking, the substitution or elimination steps to solve a system only derive possible solutions. The proof that we have found actual solutions is in the checking.
This point is brought home by considering certain nonlinear equations.
For example, consider the nonlinear equation 
^{2}=x+2")


(x-7)=0")


However, if you check these in the original equation, only 

The root of the problem here (pun intended) is that we squared both sides of the original equation
Exercises
- Bobby and Cindy earn a combined $134.70 when Bobby works 3 hours and Cindy works 4 hours. On the other hand, if Bobby works 4 hours and Cindy works 3 hours, they make $134.10 total. What are their individual hourly pay rates?
- (a) Use both substitution and elimination to find the unique solution of the following system. Show your work. (b) Draw graphs in the plane (in rectangular coordinates) to represent this situation.

3. (a) Represent the solutions of the following system in parametric vector form with 


4. Verify that the solution of the general system below is 

5. Show work to find the inverse transformation of the one defined by the following system. Assume you are never dividing by zero as you work through your steps.

Video for Section 1.3
Here is a video overview of the content of this section.